「変位/位置」
変位/位置一覧
- 対象件数157件
-
![]()
磁歪式リニアセンサー GYPMプローブ/GYPMCコントローラ
GYPMプローブは、従来よりもセンサーヘッド部をさらに小型化したプローブです。 センサーヘッド内の新デザインにより、ネジ側のデッドゾーンを30mmに短縮しました。またオプションにより先端デッドゾーンは40mmまで短縮可能です。 組合わせるコントローラはGYPMCコントローラですが、GYHC、GYDC-05コントローラとの組合せにより、速度出力やデジタル出力も可能です。
-
![]()
磁歪式リニアセンサー GYGS プローブ/GYGSC コントローラ
GYGSプローブはセンサーヘッド超薄型(厚み20mm)シリーズです。 油圧シリンダや各種機器に内蔵、組込んだ場合、シリンダ・機器の全長を短くすることができます。 GYGSCコントローラと組合わせて使用しますが、GYHC、GYDC-05コントローラとの組合せにより、速度出力やデジタル出力も可能です。
-
![]()
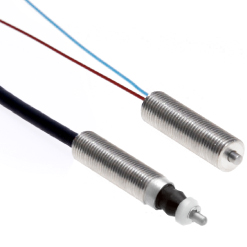
磁歪式リニアセンサー GYMS プローブ/GYMSC コントローラ
GYMSプローブ/GYMSCコントローラはコンパクト・ローコストタイプのセンサーで、線形性±0.025%FS以下を達成するなど精度の向上をはかっています。またプローブ保護規格IP67設計により信頼性を向上させています。 オプションのコネクタ型はケーブル直出し型に優る使い易さを可能としました。またGYHC、GYDC-05コントローラとの組合せにより、速度出力やデジタル出力も可能です。
-
![]()
磁歪式リニアセンサー GYPMR プローブ/GYLC コントローラ
GYPMRプローブは、新設計によりセンサーヘッド部をコンパクトに仕上げたセンサーです。 油圧シリンダに組み込む際の取付機器の全長をより短く収めることが可能になりました。別売ソフトにより客先でのゼロ・スパン調整が可能となりました。 また組合わせる位置出力用のコントローラはGYLCですが、GYHC、GYDC-05コントローラとの組合わせにより、速度出力やデジタル出力も可能です。
-
![]()
磁歪式リニアセンサー GYAF1 プローブ
GYAF1プローブはフランジ形状型のオールインワン型センサーです。 DC24Vを供給するだけでマグネット位置に比例したアナログ電圧または電流を得ることができます。反転出力、バイポーラ出力にも対応可能です。 薄型ヘッドは装置の小型化を可能とし、フランジ取付は従来のネジ式に比べて作業性を向上させました。
-
![]()
磁歪式リニアセンサー GYcAT プローブ
GYcATプローブは、GYFC2アナログコントローラとほぼ同等の機能を全てプローブヘッドに収納し、DC24V電源を供給するだけでマグネット位置に比例した高精度のアナログ信号を得ることができます。 出力信号は0~10Vまたは10~0Vの電圧出力が標準です。 また4~20mAまたは20~4mAの電流出力も可能です。 マグネットの異常を検知する警報やノイズキャンセル機能を標準で備えています。
-
![]()
磁歪式リニアセンサー GYLS/GYLT プローブ
GYLS、GYLTプローブは、ローコストのオールインワン型センサーです。 低消費電力、ねじ結線タイプコネクタの採用などによりローコスト化、現場作業簡素化をはかりました。 電圧出力(GYLS)、電流出力(GYLT)の2タイプがございます。
-
![]()
磁歪式リニアセンサー GYSE-P プローブ
Profibusは全世界で最も多く使用されているフィールドバスです。 そのProfibus出力型「GYSE-P」を、新たにGYSEシリーズに追加しました。 GYSE-Pプローブは、マグネットの変位を最大ポーレート12MbpsのProfibus DP(DPV0)にて出力します。 センサパラメータは(分解能、出力方向など)はProfibusを通じて客先にて設定可能です。 また1台のGYセンサで、最大32個の検出マグネットを同時計測することが可能となりました。
-
![]()
ロボット連動型ガイドツール VISIONSCANNER2
EngRoTech社の光切断スキャナVISIONSCANNER2はロボットアームでの計測と制御を小型な本体にワンパック化しており、「測定」「座標を修正」「正しい位置に移動」をひとまとめにする事が可能な次世代ガイドツールです。測長、角度計測、円周計測、面積計測などの各種計測ジョブを組み合わせて、指定の閾値に対してOKやNG判別などが可能。 また、ロボットコントローラーとの連携のための座標管理にも対応。 コントローラーから取得したロボットの現在位置と計測結果から導き出された相対座標を使い、修正座標をフィードバックする事でロボットに修正位置の指示を出す事も可能です。 TCP/IPやUDPなどプロトコルでPCとの通信や、ロボットコントローラーとの通信も可能です。 ●GUIによる測定範囲指定での簡単ジョブ作成 ●KUKA, ABB, FANUC, YASKAWAなど各種ロボットコントローラーに対応可能 ●制御マスターをデバイス側にする事でPCレスでの動作も可能
-
![]()
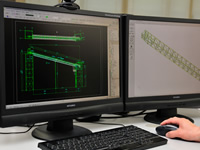
産業機械 プラント配管 CADサポート
【設計業務】 産業機械、プラント設備: 計画図/組立図/詳細図/スプール図 構造計算、現場調査、3次元測量 【図面データ化】 手書き図面を2D、3DデータにCAD化。 大量図面も対応可能。 【使用ソフト一覧】 2次元CAD:CADSUPER、AUTOCAD 3次元CAD:ICAD_SX 構造計算:midas 他 【お問い合わせ】 URL:https://www.masaki.co.jp/ TEL:0439-54-6500 設計事業Gr営業課:佐藤
-
![]()
6軸ヘキサポッドシステム CIPA認定品 H-811
耐荷重5kg トラベルレンジ:34mm/42° アクチュエータ分解能:40nm 最小インクリメンタルモーション:0.2μm 再現性:±0.1μm ファイバー光学アライメント用スキャンアルゴリズム含む
-
![]()
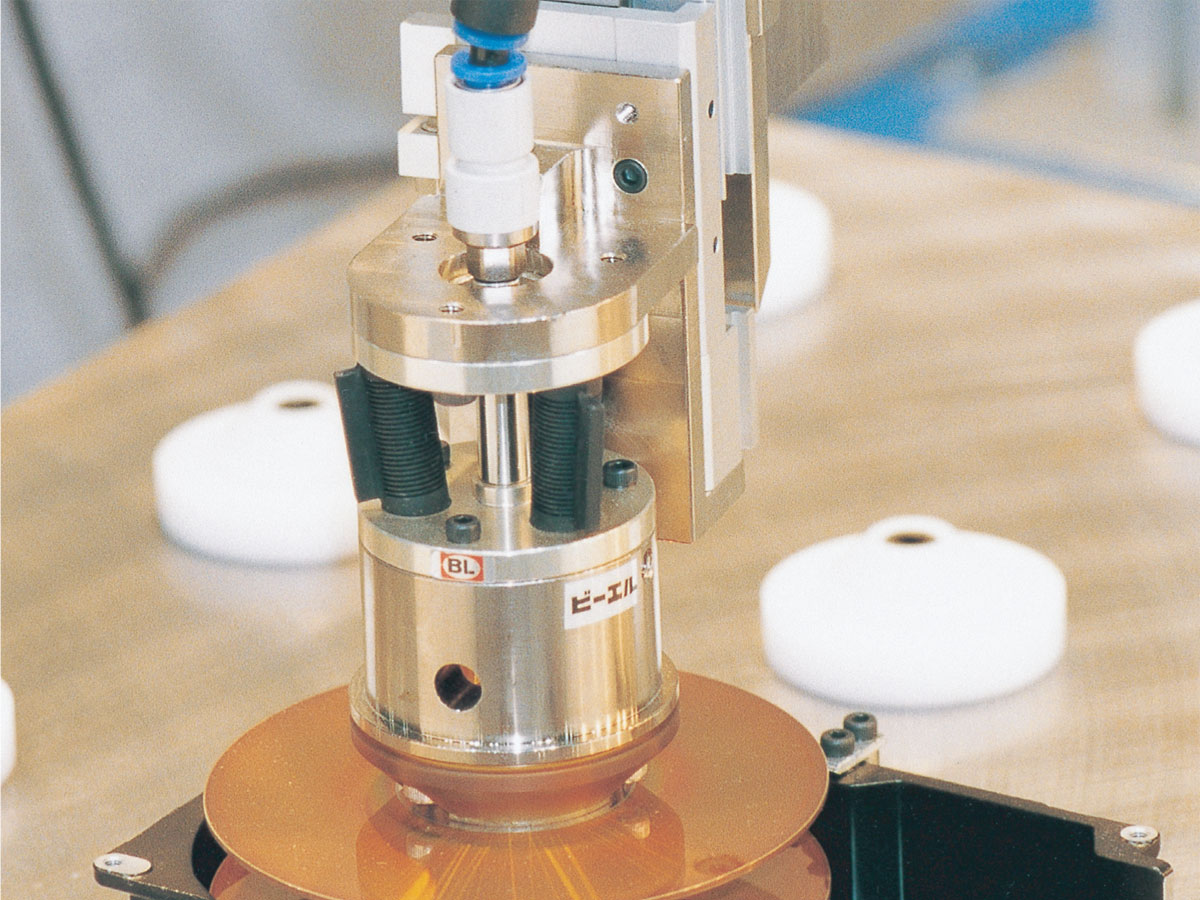
リストコンプライアンサ(位置誤差修正装置)
リストコンプライアンサはRemote Center Complianceの機能をゴムエレメントにて実用化したRCCデバイスです。 ロボットや自動組立て機械のアームとグリッパ間に装着することにより、挿入作業時の部品間の水平方向および角度(こじり)方向の誤差を修正し、「かじり」「こじり」による挿入ミスを無くします。
-
![]()
-
![]()
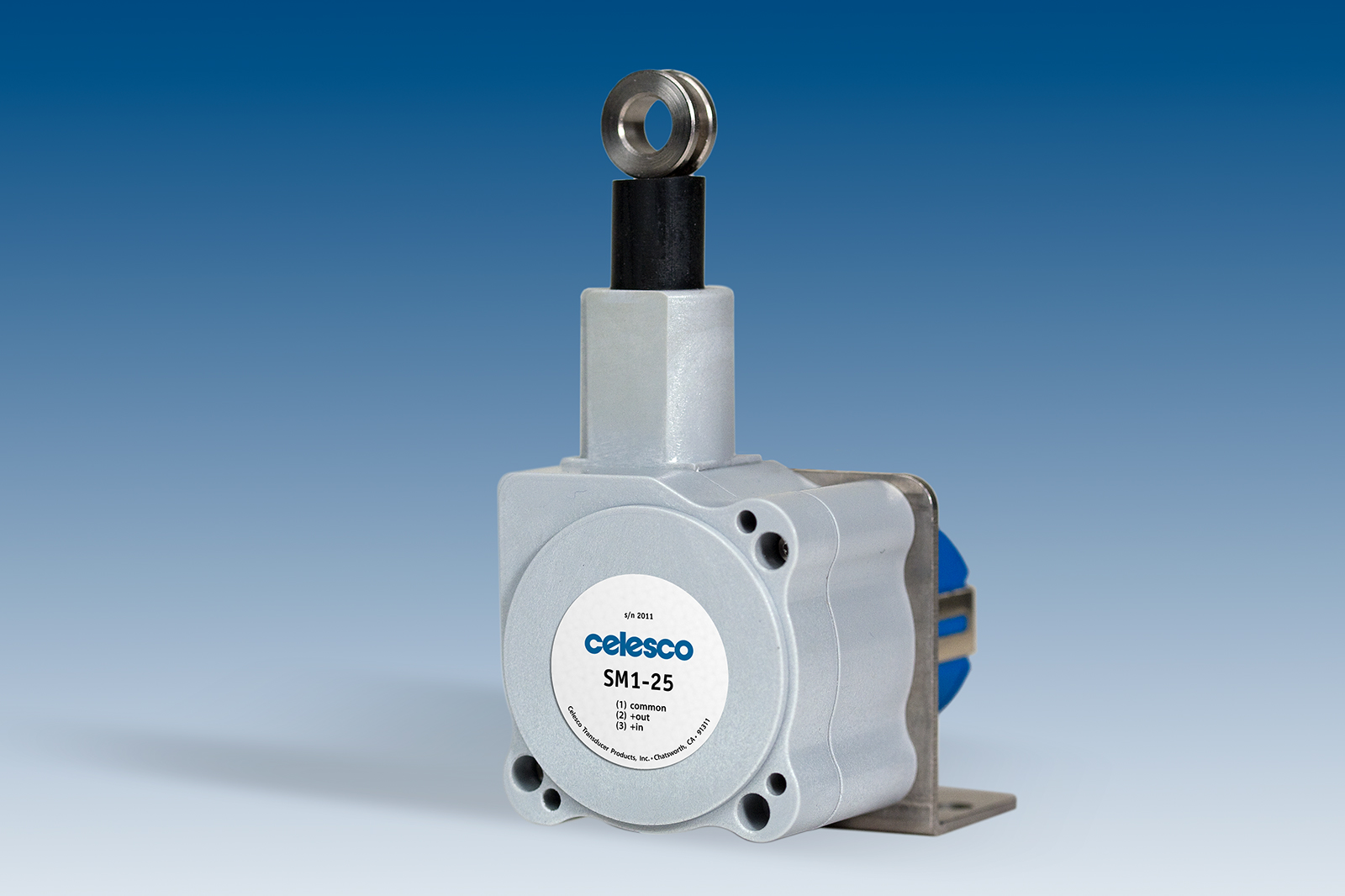
Celesco社製ワイヤ式変位センサSR1
・軽量/中短距離 ・計測範囲:0~1500mm、0~3000mm、0~4445mm ・保護環境:NEMA1,IP67 ・出力によって選べるモデル SR1A→ポテンショメータ SR1E→インクリメンタルエンコーダ SR1M→4~20mA
-
![]()
精密位置決めスイッチ
あなたも「位置決め」に関するこんなことで、お困りではありませんか? ・マイクロスイッチでの "微小動作検知" ・近接センサの "相互干渉" ・光電センサの "温度ドリフト" ・レーザーセンサの "真空対応" ・接触式変位センサの "コスト高" 上記のような問題でお困りなら、『精密位置決めスイッチ』にお任せください! (つづきは↓ 改善事例が満載!) www.ichigime.com
-
![]()
-
![]()
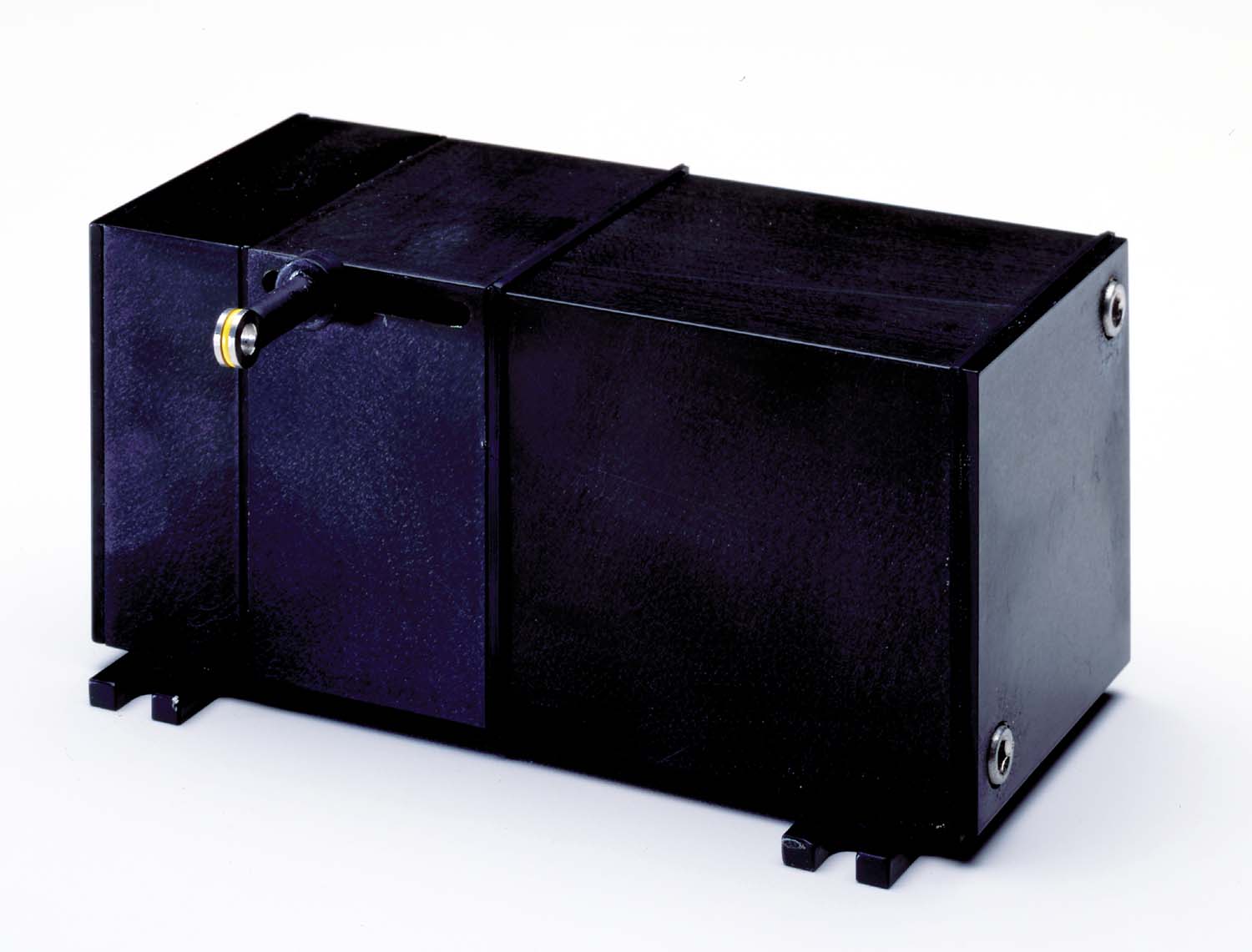
Celesco社製ワイヤ式変位センサPT5
・高サイクル/高速移動/短・中距離 ・計測範囲:0~6350mm ・保護環境:NEMA4,IP65 ・出力によって異なるモデル PT5A→ポテンショメータ PT5DC→0~10VDC PT5E→インクリメンタルエンコーダ PT5MA→4~20mA
-
![]()
-
![]()
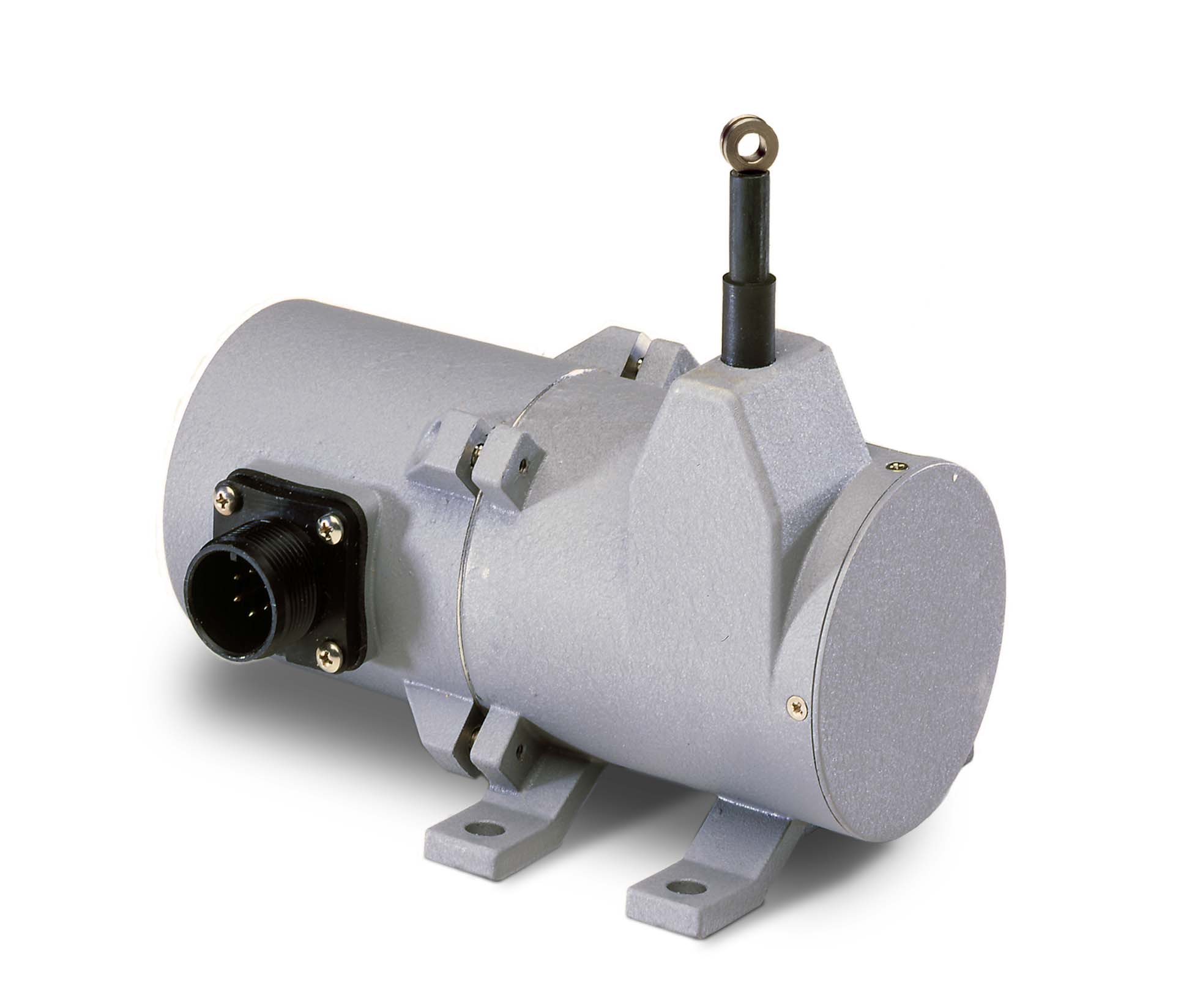
Celesco社製ワイヤ式変位センサPT8101
・工業用/短・中距離/防爆仕様(PT8420のみ) ・計測範囲:0~1524mm ・保護環境:NEMA4/4X,IP65/67 ・出力により異なるモデル PT8150→インクリメンタルエンコーダ PT8510→0~10VDC PT8420→4-20mA(防爆仕様)
-
![]()